Hi all,
This is my first post here. I am Mauro and work for Agilent. I found this forum by chance and it seemed quite interesting to me so… here I am. I read this thread and just wanted to add my two cents.
Besides what @Pete suggested there is another trick for “virtually” removing a plate from a Bravo platepad. I call it the phantom robot / virtual waste trick. It involves the following:
First you add a Phantom Robot and a Waste to your device file (I typically rename the Waste to “Virtual Waste”):
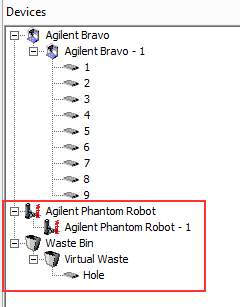
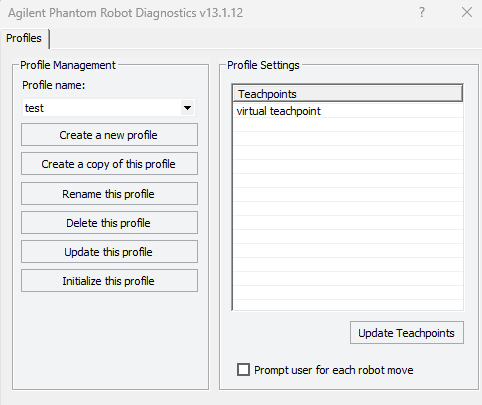
The phantom robot profile will only have one “virtual teachpoint”
Then you connect the “hole” position of the virtual waste with the locations of the Bravo that you need to free up during the protocol.

and, say, loc 1

you can do the same for all the other positions.
Once you have that you can create the protocol. Suppose your protocol contains two blocks, one involving plate1a, plate2a and tips1a (block1) and the second involving plate1b, plate2b, tips2b (block2) and you want to first run block1 and then block2 you can do this:
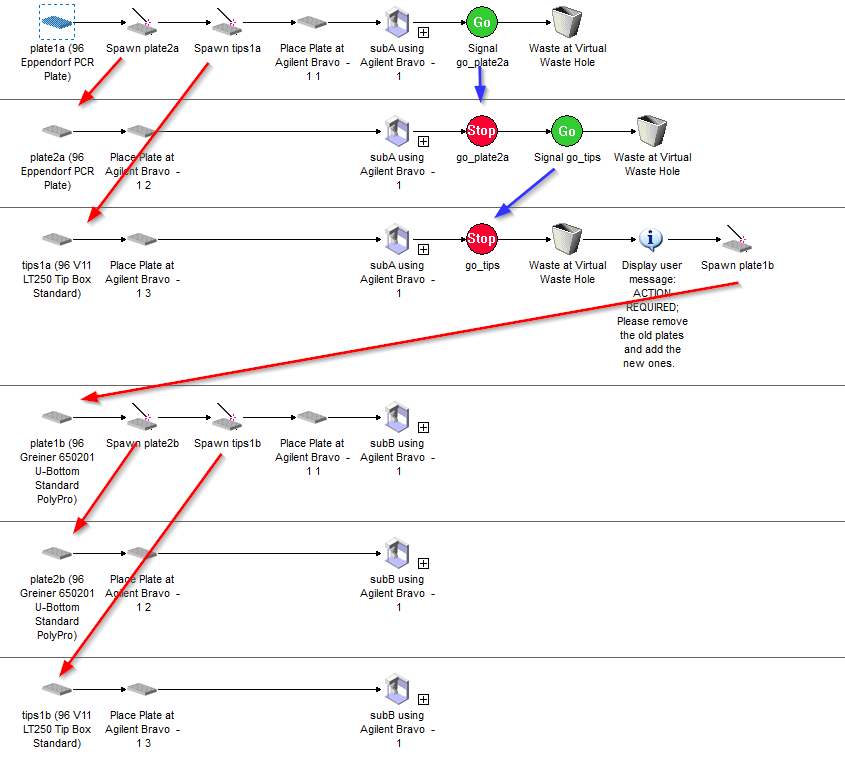
Remember that in VWorks the rule is “all process plates (or swim lanes) start at the same time unless mentioned in a spawn or process control”. So, at startup plate1a spawns plate2a and tips1a, the subprocess is executed and at the end we make sure that all process complete before virtually removing the plates form the deck by trashing them all to the virtual waste. A user message asks the user to remove the old plates from the deck and add the new ones and finally a spawn task runs the first process of block2 (plate1b) that in turn spawns plate2b and tips1b.
The compilation step returns no error because there is no overlap of platepads (block 2 is launched after block1).
When using the phantom robot be careful because sometimes VWorks tries to use the phantom robot to “virtually” move plates on the deck (this may result in REAL CRASHES!), so what I usually do is add MANY phantom robots and MANY virtual waste devices, one for each position involved in the protocol. It is safer and quick, once you have a template device file.
I hope this helps.