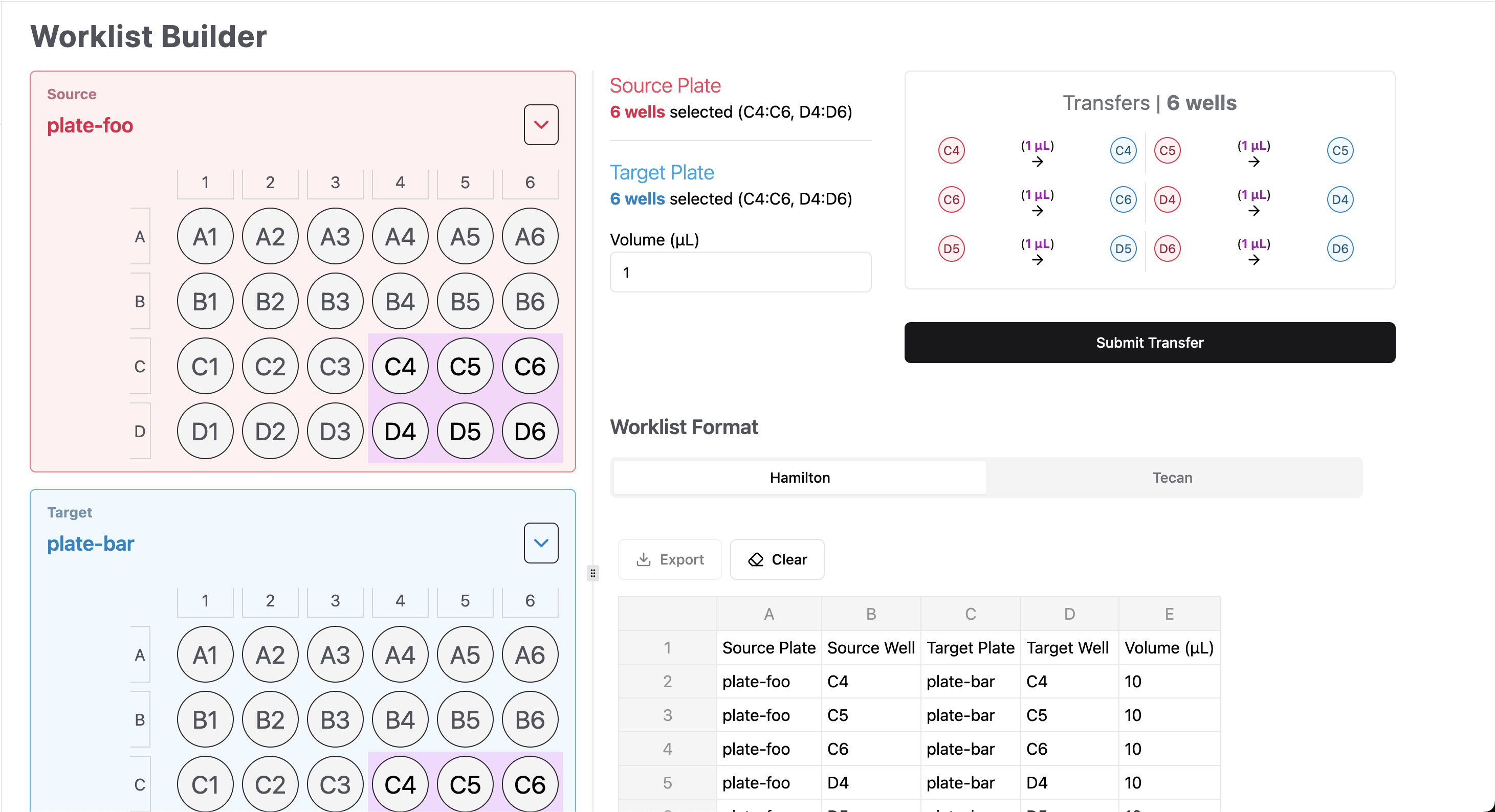
Hi! I’m building a tool to make managing platemaps easier ( https://plateplanner.nitro.bio/ ) and I’m considering building an integration with opentrons.
As an example, I’ve heard that creating transfers in Protocol Designer can be tedious and I’m wondering if the worklist builder I’m putting together could save people some frustration.
As someone who manages a team at Opentrons, I think this would be very helpful. We’re launching CSV file handling in our next SW release, but for now, it will only be available in Python. This is something we get asked about in PD all the time!
Your protocol designer looks awesome! If you have it interface with the robot through PyLabRobot, it will be compatible with OT as well as Hamilton STAR(let), Vantage, Tecan EVO, and soon others.
As an engineer as well, I’m very interested if any of the components will be released as opensource. There are definitely not many well plate visualisations out there.