Greetings,
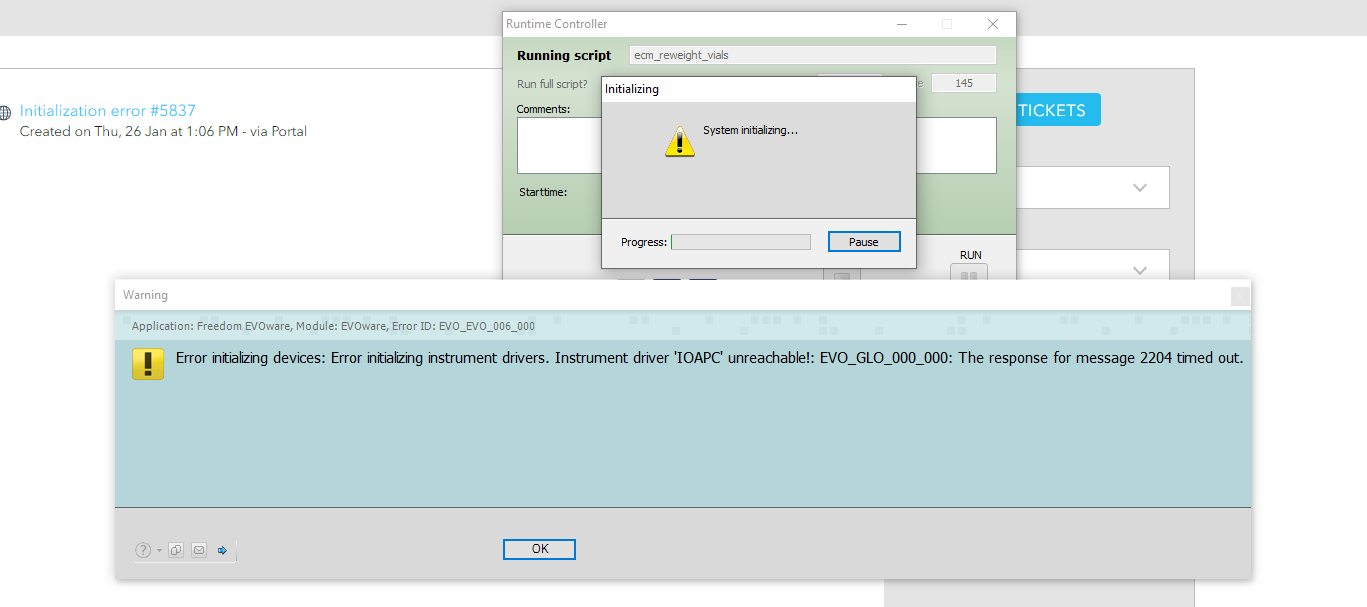
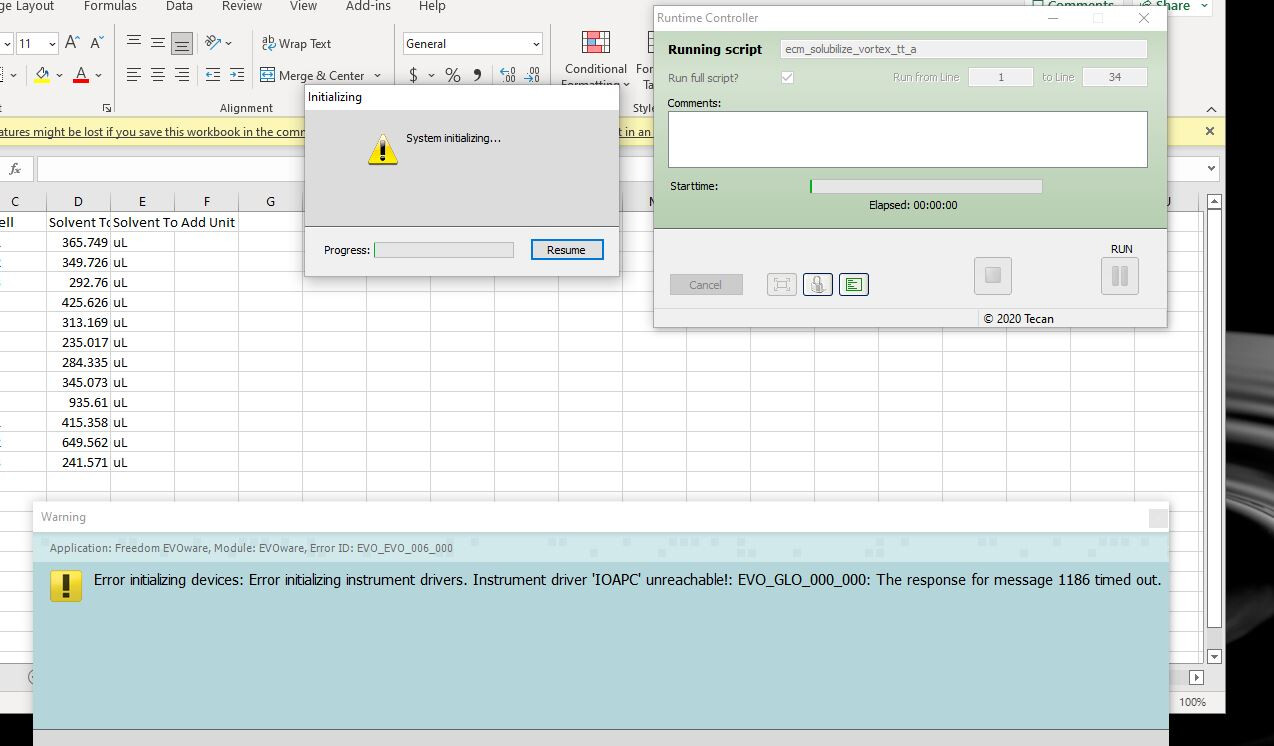
Two of the most common errors our users often report are: “Device not implemented” and “Device not initialized”.
Without a Firmware Manual, it’s a little bit difficult to fully understand what story the log files are telling.
Powering down both the instrument and restarting the pc (in some cases more than once) seems to be the only cure for these pesky errors.
Robotic Protocols are initiated in a LIMS software that calls on & launch EVOware to start the script
Scripts that are run directly in EVOware (independent of LIMS) seem to complete almost always without errors.
Are these errors the result of a break down in communication between the LIMS system (on shared server) and EVOware?
Or are these errors tied to EVOware unable to establish communication to the instrument and initialize?
Thank you very much for your input.
these errors indicate a physical issue in communicating, via the instrument CAN to various devices/modules
for example, inability to contact a dilutor
it sounds like there is an initialization conflict when EVOware is triggered via the LIMS software - there are various levels of error logging that could be incorporated into the LIMS driver
1 Like
This subject is definitely not my area of expertise, but just a few thoughts on this that come to mind from my perspective.
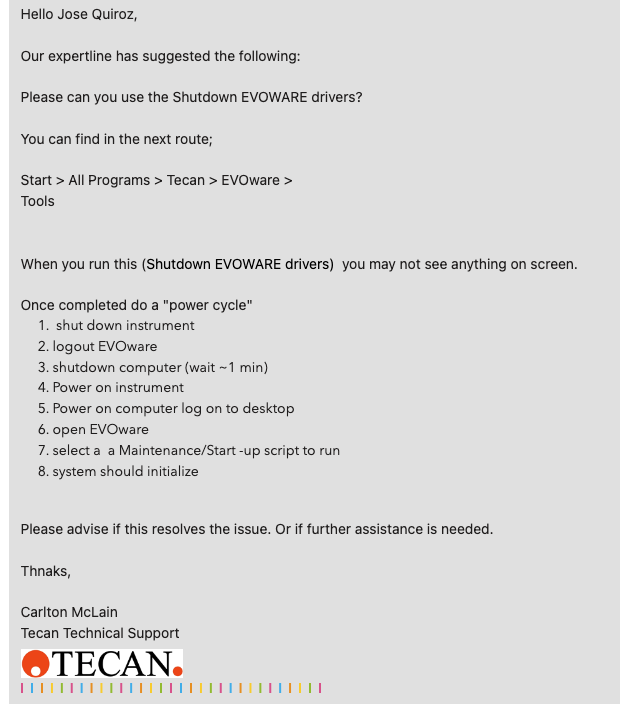
Might this also be resolved by utilizing Tecan’s Shut Down All Drivers desktop command to ensure a common starting point each day or method execution?
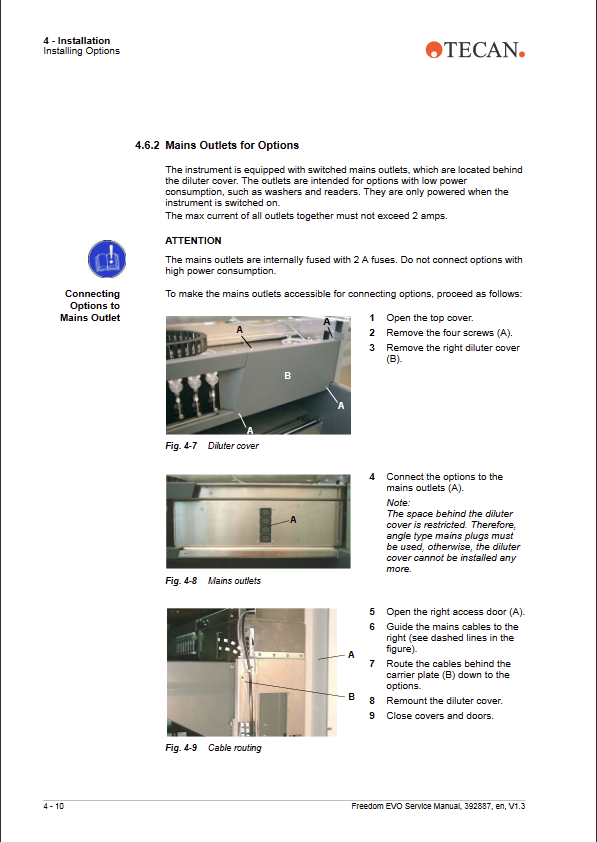
Similarly, ensuring that instrument peripheral devices are utilizing the power sockets on the EVO itself may be a hack way to force that devices are powering on and off in sync with the EVO itself - assuming these are peripheral devices like a Te-Shake instead of EVO instrument components themselves.
1 Like
I feel your pain, we used to get these errors all the time and they are super annoying we worked with Tecan via https://helpdesk.tecan.com/en/support/login and found something that worked for us we still do not know the cause.
these are some of the error we used to get:
This is what worked for us and I know it does not make sense but try it:
1 Like
Thank you for your input. I hadn’t thought about having a common power socket used to connect the instrument, the pc, and peripherals. I will certainly give that a try.
As for unloading the drivers in EVOware, it is implemented as part of each run; every operator is instructed to unload the drivers before exiting EVOware
I appreciate your time. I will for sure try the power cycle sequence next time we encounter some of our errors.
Tecan unfortunately will not troubleshoot communication errors resulting from software other than EVOware such as LIMS software interfacing with EVOware.
Thank you kindly!
Thank you
“…there are various levels of error logging that could be incorporated into the LIMS driver…”
Would you suggest looking if these errors are logged in the LIMS software to see if these logs contain info that may point you to the right direction?
just making sure I understood your statement 
Gratitude !
For reference
Alternatively, virtually any uninterruptible power source will have master/controlled outlets available.