Has anybody here bought the new version of the Hamilton STAR with the FluidMotion channels? If so, what are your thoughts on that emerging platform? I know that configuration was just released but I thought I’d see if there has been adoption yet.
Any pain points of ‘gotchas’ that the wider group ought to be aware of?
I am out of the loop. does FluidMotion have an additional sensor that actively follows liquid level. I am not sure of the real benefit of the FluidMotion as it seems like it’s still dependent on LLD which doesn’t reliably for volumes below 20 uL.
Hi @Brad, thanks for inquiring. It may still be too new to see much in the way of community feedback, but internally, the support team that contributes to this forum has had access to the new technologies since the start of the year.
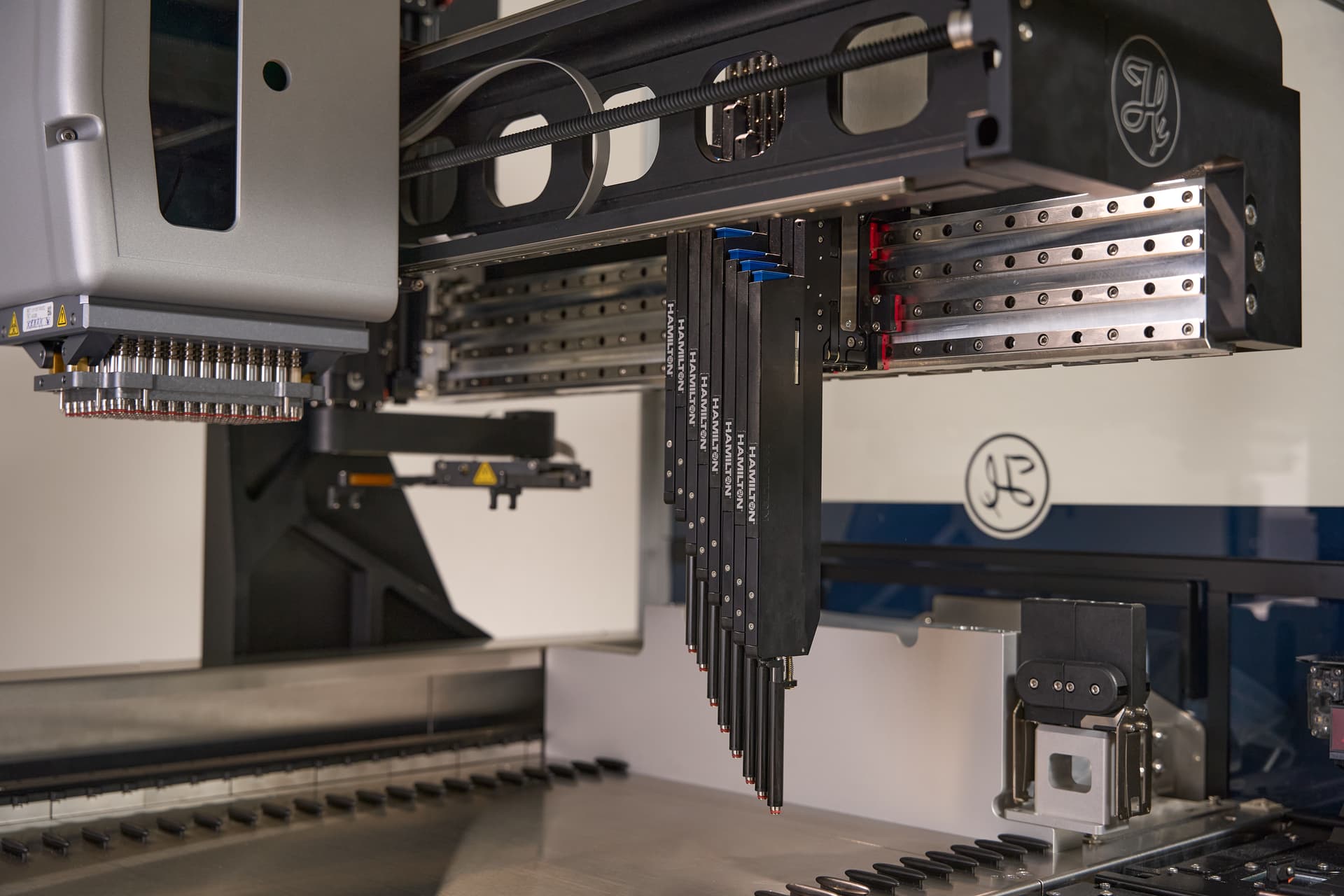
Fluid Motion is the term for the drive system (gantry) that provides access to the workspace. Benefits include:
More deck access with the thinner arm so larger usable workspace to maximize walkaway time
Linear motor technology, so the movements are smoother and faster
X1 Channel is the new, compact, and user-exchangeable 1mL air displacement channel configured for Fluid Motion. Benefits include:
9mm spacing on the same y-drive
User exchangeable
Manual tip release button
Improved cLLD with the ability to detect less than 10μL liquid (depending on labware)
Improved z-tracking during aspiration
We’ve been showcasing it at tradeshows such as SLAS and ADLM. For anyone near the RTP area, we have a STAR and a STARv (VANTAGE) set up at our satellite office in Morrisville, NC. Please reach out if you’re interested in seeing it in action or check out the recent webinar here.
No “gotchas” from what we’ve encountered besides the steps involved in upgrading older methods to VENUS 6.
@EricSindelar_Hamilton I am intrigue with “Improved z-tracking during aspiration.” Are there sensors that can detect where the liquid level is? With the currently channels, I believe z-height tracking is based off of labware definitions where z-height is computed using those definitions.
The liquid level can be detected using either cLLD or pLLD, with improvements made to the cLLD as mentioned above. The new X1 channels also follow the liquid more accurately to the container definition when the required volume spans multiple segments.
During pipetting, the pressure sensor can be enabled to monitor the transfer with TADM, the same as the legacy channels.
I checked with the internal teams who relayed that the legacy channels have limited processing power while the X1 channels have improved components and can provide variable speeds during pipetting to better accommodate multi-segmented containers.
The legacy channels have a fixed speed. If the liquid to be transferred is in two segments of the container, then an average speed is calculated that suits for both segments. This is sufficient for many use cases, but is now further optimized with the new X1 channels.
Unfortunately upgrading an existing system to fluid motion is not available at this time. While a CO-RE 2 upgrade is a more localized upgrade to the pipetting head, fluid motion channels have an entirely new and different gantry.