Is there a way for Hamilton to detect in Venus when the 96 head did or did not properly pick up tips?
Thanks!
Is there a way for Hamilton to detect in Venus when the 96 head did or did not properly pick up tips?
Thanks!
As far as I know, not without some sort of complex workaround. But if you use liquid level detection, it has the effect of checking if tips are present, as otherwise the liquid is not detected. This will not work with the clear tips.
Hi @trand16,
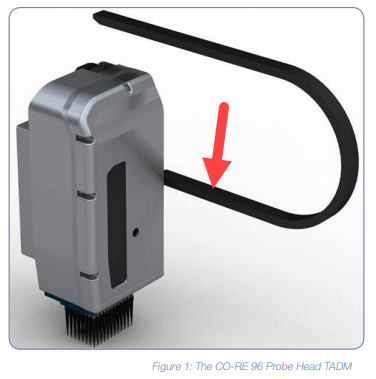
Both the base multiprobe head (MPH) and the TADM MPH do not have the ability to detect tips being picked up. Both models do have cLLD channels for A1, B2, G11, and H12 and this can be seen from their slightly different color to the rest of the channels (beige versus silver). But the TADM MPH has pressure sensors on each of the 96 channels and so during an aspirate step that occurs post tip pickup you can use TADM to determine if tips were or were not correctly picked up.
Otherwise, as @Evolucian said, you would likely need a complex workaround. For example, use filtered tips and a camera channel (which you may or may not have on your system) with a modified program from one of our easyARW workstations to take a picture of the tip rack where you just picked tips up from.
This being said, would you happen to be asking about this because you have an MPH that is failing to reliably pick up tips?
Matt
Hey thanks for the message. @MatthewSmith_Hamilton . No I am developing a script that picks up tips multiple times in a run with the 96 head. My concern was that a tech forgets to reload tips and then my script doesn’t allow them to pick up tips again. But I ended up just scripting in to prompt them when to reload tips.
Thank you!!
Hi, you can also make the 8 channels to take/drop tips, to be sure the tips were added
Does the Hamilton 96head have a separate pressure sensor for each channel? This is amazing!
Hi @Yang, only on the TADM MPH model. Most MPHs in the field are non-TADM models but they can easily be identified by having an additional e-chain as seen in the image below:
That’s great, thanks for your response.
Thanks yall
@MatthewSmith_Hamilton, I am revisiting this thread to gain a deeper technical understanding of the underlying hardware logic for the CO-RE 96-Multi-Channel Head, specifically regarding Z-axis feedback and tip sensing.
There are a few technical areas I am hoping to clarify:
1. Z-Drive Feedback and Collision Detection
The Z-motion profile of the 96-head is distinct from the independent 1 mL channels. I have noted that the Z-drive does not typically report “Step Loss” in the same manner as the independent channels. Is there a mechanical or firmware-level reason why Z-plane crash detection/step-loss monitoring is handled differently on the 96-head assembly?
2. Tip Presence Logic on XRP Channels
It is my understanding that XRP channels primarily utilize Z-location step loss to verify tip presence (e.g., descending past the expected pickup point triggers a “No Tip” error).
3. Workflow Optimization
Currently, to ensure tip existence, we perform a quick “pickup and place” sequence using the XRP channels. However, this adds significant overhead to our protocol timing during each tip reload. We are looking for a more efficient method to validate tip presence without this physical move, potentially through the aforementioned capacitive delta or even computer vision.
I would appreciate any insight into the raw sensor data available for the 96-head that might allow us to streamline this verification process, as both the typical and TADM have cLLD.
Hi @zachary.milot,
See below my responses to your inquiries:
Z-Drive Feedback and Collision Detection:
The Z drives of the independent channels and the multi-probe head are different. Most differences you notice can easily be summed up to the size differences between the two as well as the fact that channel z-drives are belt driven while the MPH is on a spindle. Notice that when the system is powered off you can easily move the channels up and down but the MPH has a ton of resistance. It just takes so much more force than channels to start/stop moving the MPH or have it stall, and increasing the sensitivity of the MPH’s Z drive is likely to only result in premature step losses. So while the MPH isn’t capable of replicating gentle Z stalls in a manner equivalent to the channels, improvements have been made to MPH firmware to get closer. It also isn’t to the point where we can rely on Z stalls for tip pickups using the MPH. Without this, we can’t monitor height as feedback, meaning the MPH can’t use tip type recognition.
Tip Presence Logic on XRP Channels
Tip pickups with channels are basically as follows:
Workflow Optimization
Unlike every independent channel, the MPH is only equipped with cLLD sensors on A1, B2, G11, and H12. And while also stating that the channels can utilize stall position as well as collar retract position to verify tip presence while the MPH cannot, I think that you will find that validating tip presence for the MPH by a mechanical means is quite difficult. In regards to channels though, instead of using a “pickup and place” method, have you considered just loading more tips than needed on the deck and utilizing the “next” option in custom error handling? If a channel fails to pick up a tip the next option will have the channel move to the next available position and try the pickup there.