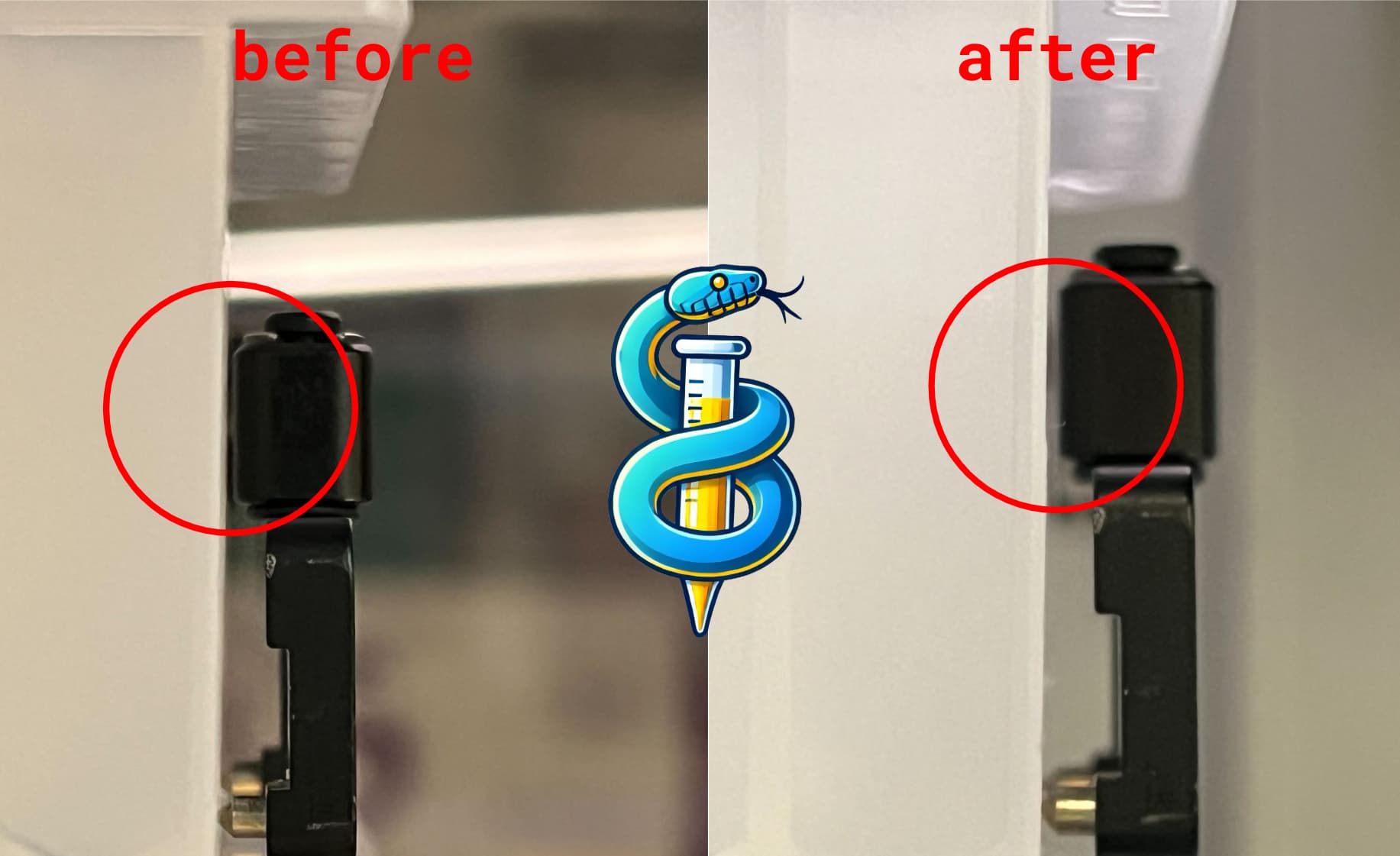
I notice while gripping tall vertical surfaces, the two smooth metal sides of the iSWAP hand contact my plate more narrowly than the metallic fingers themselves. the plate rotates in the iSWAP grip & cause crashes
in this application, I require to grip the middle of the plate rather than the top of the plate, as the plate is going into an external hotel location with limited Z axis clearance (vspin centrifuge). so the metal sides of the iSWAP leading up to the gripper itself need to be below the top of the plate to fit in my centrifuge
has anyone troubleshooted these tricky constrained gripping scenarios?
I think Hamilton has a few different grippers I could be wrong. Have you emailed your sales rep? I may be misremembering since I was working on custom integrations, not sure if the dif grips are standard parts for sale
If you replace the gripper pins you’ll have to open your gripper wider to clear your labware before gripping. Not sure if you have tight labware access restrictions.
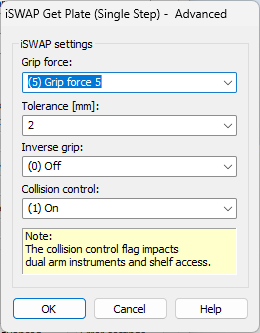
You could try optimizing grip force and see how much it squeezes your plate, and how secure it is when moving the labware.
Also label them as custom. If you get hit by a bus, the next guy would never be able to tell its custom and will bang their head on a table assuming its standard.