We have a STAR with 7 integrated devices: 4 on the sides & 3 in the front. To increase throughput, we are considering upgrading from 8 to 16 pipettes. Does anyone have a clear understanding of how much the iSWAP movement is constrained with a 16-pipette system?
We are especially concerned about access to integrated devices on the front left and right sides of the STAR, outside of the robot.
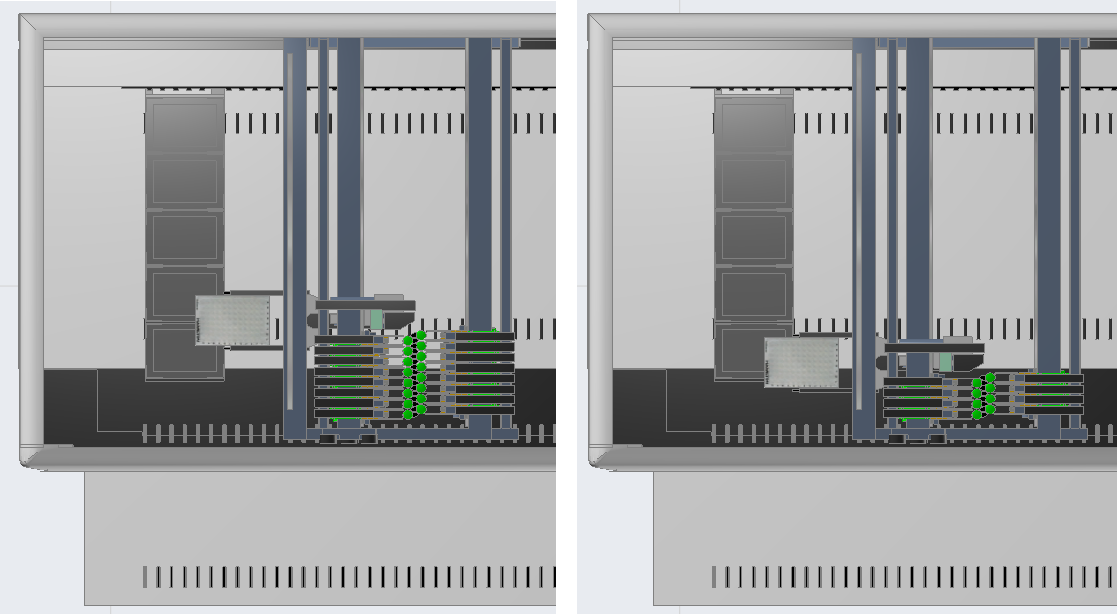
Adding 8 more channels would create some access restrictions to the front-most positions. See below for a mockup using our internal quoting configuration software:
I would recommend contacting your local sales support team as they can coordinate with our internal Custom Solutions team to model the setup to give you an accurate answer and account for other factors. Let me know if you need any assistance in getting in touch with them.
Does anyone have an answer for access to the front of the robot with p16? ie: stretching the iSWAP so integrated equipment can be placed where the autoload would typically be, in the front of the robot