Hello,
searching throug the forum didn’t return any matches so I wonder if this problem is specific to my software version/installation - however I cannot find a way to program a sequence required for plate transfer by CO-RE Grip. I simply cannot select the carriers or address individual positoins on them. Does anybody know what the problem might be please? The aim is to create a magnetic beads clean-up method so the plate must move to/from the magnet.
@Nikolay You need a sequence representing the plate the on the deck and a sequence representing the plate on the magnet. Then (at least the way I do it) you can “Get Plate” using the deck sequence and “Place Plate” using the magnet sequence

5 Likes
This is correct. I’m not sure which version of software you’re using, but the concept is consistent across revisions. Section 16 of the programmer’s manual covers this in more detail. The example provided has some complexity using an array of sequences, but that isn’t required and you can define the specific sequences in the step like @FEPrecedeBio detailed.
For transports to work in VENUS, the source and destination labware need to use the same labware definition.
2 Likes
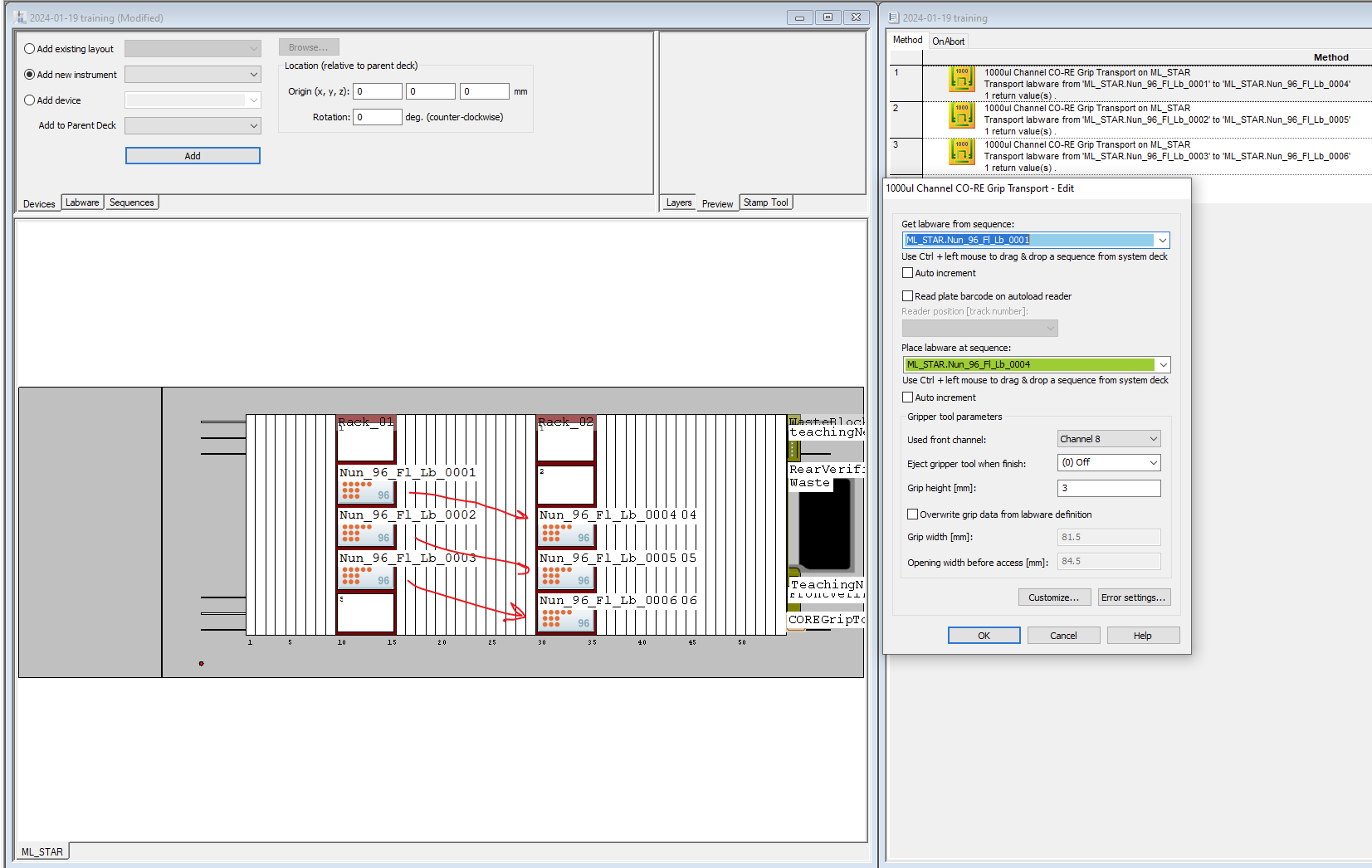
Thank you, both! so in order to move 3 plates from left to right (Rack_01 → Rack_02) , I should set up a deck+method like this and just not load any plates on Rack_02 when setting up the run? CO-RE Grip transport smart step seem to be an easier option than Get+Place combo used by @FEPrecedeBio - is there any reason to avoid it?
2 Likes
Correct. There is no reason to avoid the “gold” step that combines the Get and Place. The single steps just allow for more flexibility in case there are other steps to insert between the Get and Place.
2 Likes
sorry to resurrect this topics but could somebody explain why “OK” is inactive in CO-RE Grip menu? conceptually, it’s no differetn to the screenshot above but Venus just wouldn’t accept this command for some odd reason…
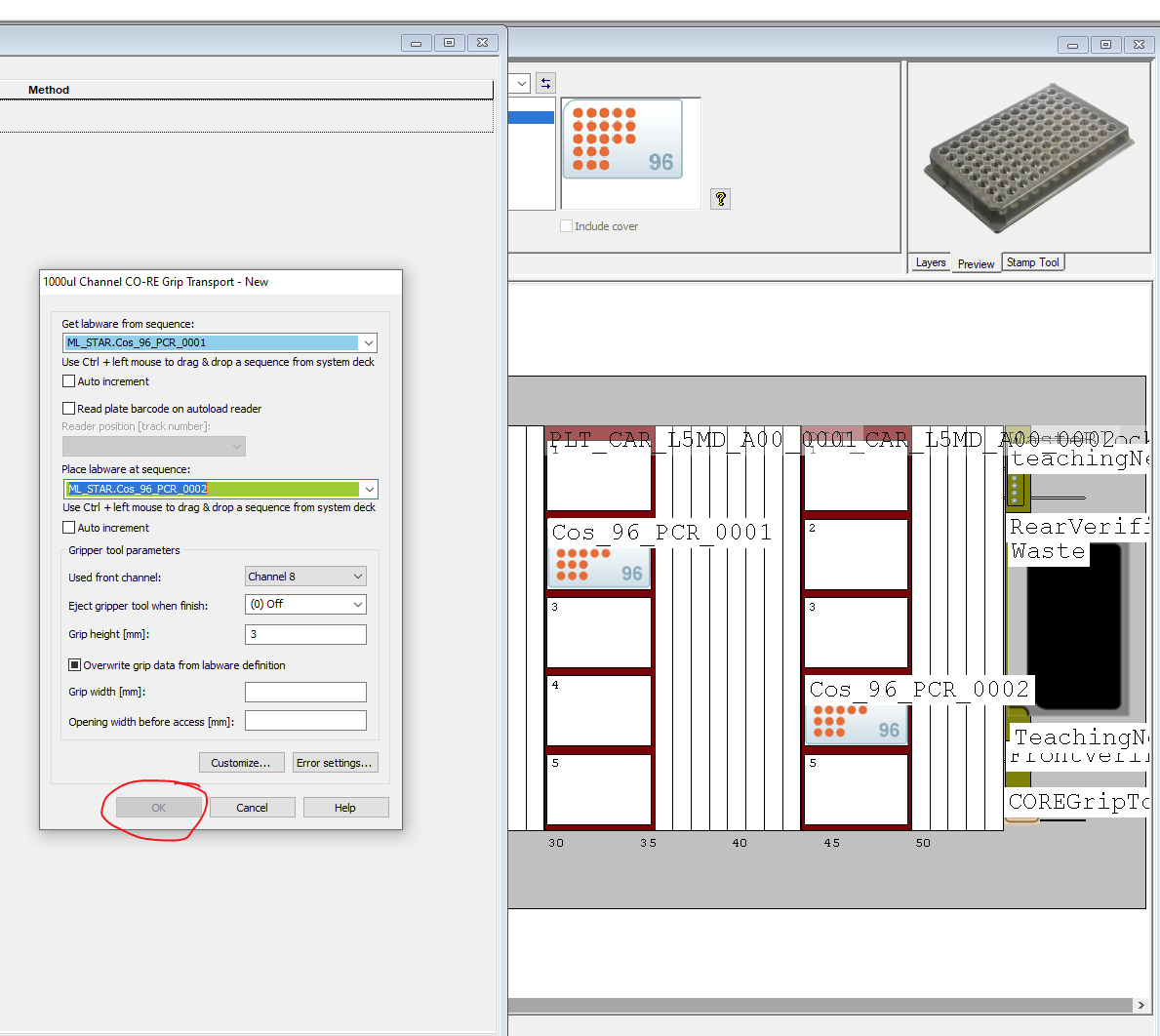
hm, played a bit more with this one … it works with “Nun 96 Fl Lb” plates but not with “Cos 96 PCR” although both look like skirted plate plates on the screenshots. Is there any way to predict which plates are acceptable to CO-RE Grip and which are not? other than by trial and error
Hi @Nikolay ,
If the labware definition has the segments defined (optional measurement of wall width/height), then these parameters will be automatically filled in. If you use a variable or those segments are not defined, then they will remain blank and need values to be filled in.
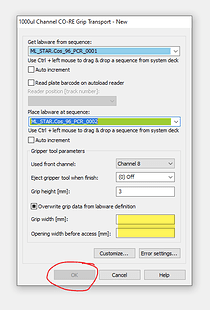
Fill in the Grip width and open width properties and then the OK button will become re-enabled.
2 Likes
thank you @BrandonBare_Hamilton . Looks like a caliper will become my friend for a while ![]()

4 Likes
Everything worked fine in the simulation (obviously ![]() ) but in the real world the gripper misses a plate by quite a bit on the Z axis. I’m fairly certaina that the carrier and the plate are defined correctly. I’m not too sure baotu grip width or openning width - but names suggest they should not impact on Z axis position? The Co-Re tool does not go deep enough to grab the plate - the ‘jaws’ are closed above the plate and therefore it does not move. Could anyone advise how to troubleshoot this please? I don’t think that plate or carrier dimensions should change (assuming those are correct) , but is there any other parameter that controls how deep the gripper goes before closing the ‘jaws’ ?
) but in the real world the gripper misses a plate by quite a bit on the Z axis. I’m fairly certaina that the carrier and the plate are defined correctly. I’m not too sure baotu grip width or openning width - but names suggest they should not impact on Z axis position? The Co-Re tool does not go deep enough to grab the plate - the ‘jaws’ are closed above the plate and therefore it does not move. Could anyone advise how to troubleshoot this please? I don’t think that plate or carrier dimensions should change (assuming those are correct) , but is there any other parameter that controls how deep the gripper goes before closing the ‘jaws’ ?
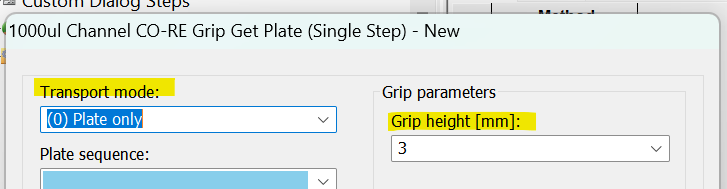
If you are sure the XYZ coords are correct in the layout file, and you’ve verified this using teaching needles, then you could look at the grip height in the grip parameters on the get plate step. Also, make sure you select the correct transport mode.
1 Like
I recommend checking that you aren’t using a deep well plate carrier on your system as opposed to a microtiter plate carrier. It looks like your system deck layout has a microtiter plate carrier defined which is taller in z than a deep well carrier but otherwise has the same x/y coordinates.
2 Likes
Thank you @Gareth and @EricSindelar_Hamilton !
I managed to sort this out eventually by adjusting “Grip height [mm]” by trial and error. My deck at the start of this topic was just a sandbox enviroment, I reconfigured it later for the actual carriers we have in the lab.
I am susrprized however that this parameter is required at all - I would have thought that Venus automatically calculates this value from the labware definition and deck layout by adding the corresponding heights?
Is manual control of [Grip height] designed to be used for plate movement? or am I using it in a non-intended way?
Yes it is intended that the grip height be specified as there may be many reasons why you need to customize it (to avoid a lid or particular segment in the geometry of the rack, etc.). The general recommendation is to use 3mm for MTP and 13mm for DWP.
As Brandon mentioned previously, if you define all the segments of the rack, then the grip width parameters would automatically be adjusted based on the grip height. But it is not required and you can also set your own grip widths.
2 Likes