Hi,
I have a Tecan Freedom EVO 200 with EVOware v2.7.
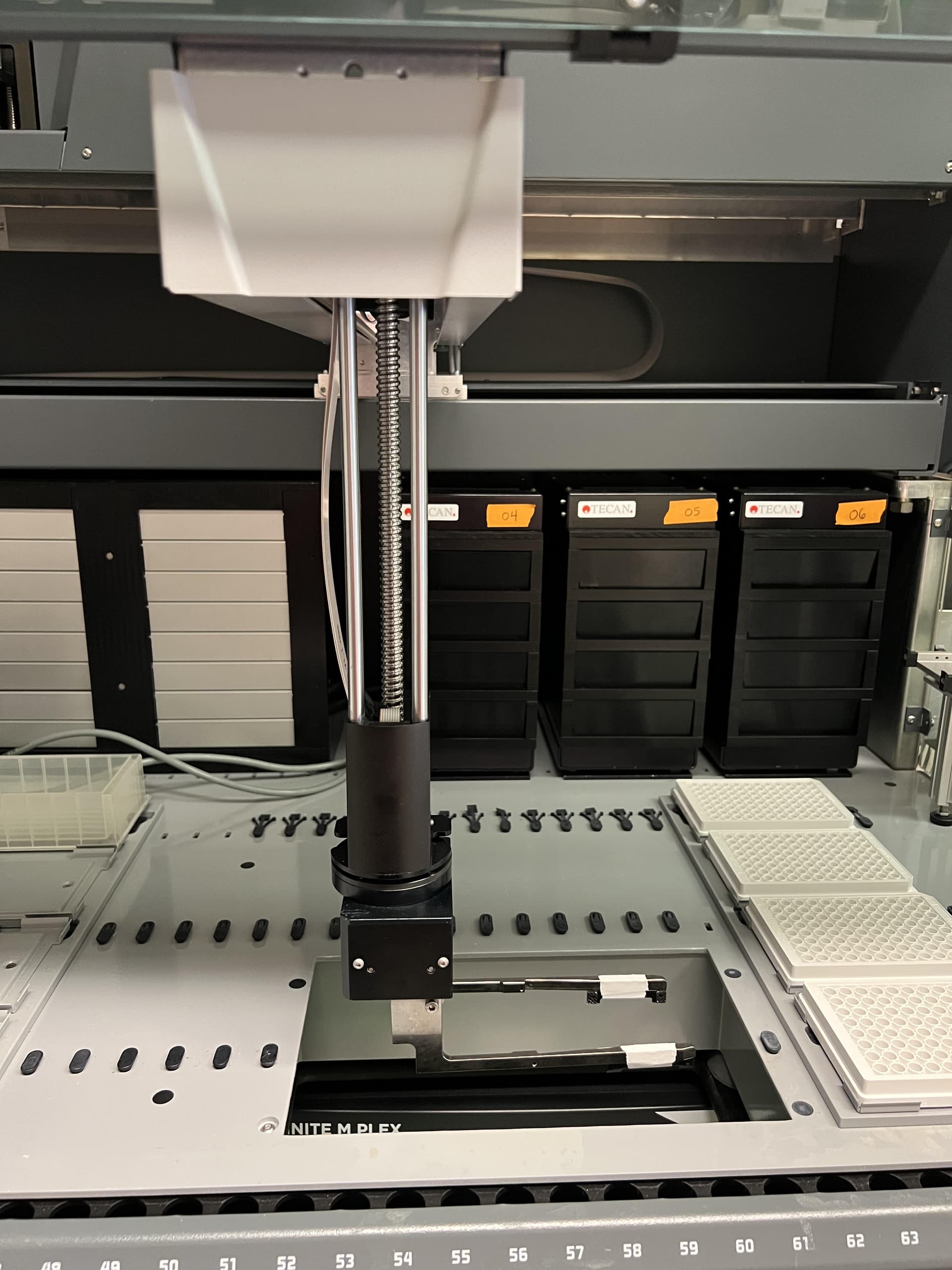
My RoMa arm is currently in an awkward position in the z-axis, a result of having to “Abort” a script. When I open EVOware again to try to initialize, the RoMa cannot move as needed, causing the initialization to error out before completing. Is there a way I can move up the RoMA in EVOware prior to this (faulty) initialization? Alternatively, I notice when the robot is off, I can manually move the RoMa in the x and y directions; however, the z direction seems to be locked when trying to push up - is there a way to manually move it up?