What differences are there in how Venus treats tips with filters vs without filters? This difference seems to be handled both in the deck layout and liquid class. How does it use this information? I’ve noticed sometimes pickups/ ejects fail if the wrong type is specified but I don’t understand why that would be the case.
Hi Stefan,
Filter vs non-filter does not have any bearing on how tip pickup commands are applied for a tip type. For tip pickups using 1mL channels, using tip type recognition (TTR), the target Z coordinate of the tip pickup (where the pipette stop disc stalls against the interior of the tip collar - ‘the stall shelf’) is set by the following factors:
- Deck Z coordinate of the tip rack (this value is the bottom end of the tip)
- Tip .ctr definition - specifically the max pipetting height value (dead volume height)
- Collar type - different for 1mL, 300/50uL and 10uL tips.
When TTR is enabled, the tip pickup command is assigned a target Z height, and a Z ‘search range’ that the pipette will use to trigger a Z drive step loss when the stop discs descend into the tip until contacting the interior of the collar. This gentle step-loss is completely harmless to the Z drive, and once triggered the pipette will grip the tip using its squeezer. This gentle tip pickup mechanism is why Hamilton platforms can pickup tips without a forced friction fit, and can be ejected without forming aerosols.
Anyways - this assigned Z target height is intended to be the exact deck Z coordinate of where the tip stall shelf is - which is dependent on the collar type and deck location. The bottom end of the Z search range of this search process is determined by the deck Z of the tip and the max pipetting height for the tip .ctr set in the labware definition (used to inform VENUS where the bottom of the collar should be).
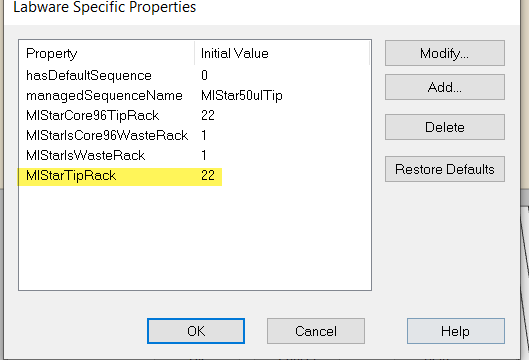
VENUS is informed of the collar type for the tip being picked up via the value of the mandatory labware property key ‘MlStarTipRack’ which is set to the .rck. The value of this property informs VENUS what type of collar is used for the tip.
Ultimately, the target Z is set relative to the where the bottom of the collar is supposed to be based on the collar type . The offset distance relative to the bottom of the search range (for the final target) is determined by the collar type. When using TTR, if the Z stall location is too far outside the assigned target, you will get an error.
All this is to say that filters aren’t impacting errors or tip pickup behavior. Filter tips are identical in geometry to non filtered, and use the same collar. In your case it sounds like something is up with the labware definitions being used, or improper Z coordinates.
If you can send an export of a method which is exhibiting these issues I can take a look. If you can supplement with the following items, that would also be helpful:
Run trace which captures the error
HxUsbComm from the day the run trace was generated.
Thanks.
-Nick
5 Likes