I’m trying to set up my Tecan deck on the visualizer, and I seem to be getting some error about the tip length. Here’s my code:
from pylabrobot.liquid_handling import LiquidHandler
from pylabrobot.liquid_handling.backends import ChatterBoxBackend
from pylabrobot.liquid_handling.backends.tecan.EVO import LiHa, RoMa, EVO
from pylabrobot.visualizer.visualizer import Visualizer
from pylabrobot.resources.tecan import EVO150Deck
import asyncio
from pylabrobot.resources import (
wash,
tip_racks,
tip_creators,
tip_carriers,
tecan_decks,
plate_carriers,
plates
)
from pylabrobot.liquid_handling.standard import (
Pickup,
Drop,
Aspiration,
Dispense,
Move,
GripDirection
)
lh = LiquidHandler(backend=ChatterBoxBackend(), deck=EVO150Deck())
lh.deck.get_resource("wash_station").unassign()
dt1 = tip_carriers.DiTi_SBS_3_Pos_MCA96(name = "tip rack carrier 1")
lh.deck.assign_child_resource(resource = dt1, rails = 6)
dt = tip_carriers.DiTi_SBS_4_Pos_MCA96(name = "tip rack carrier")
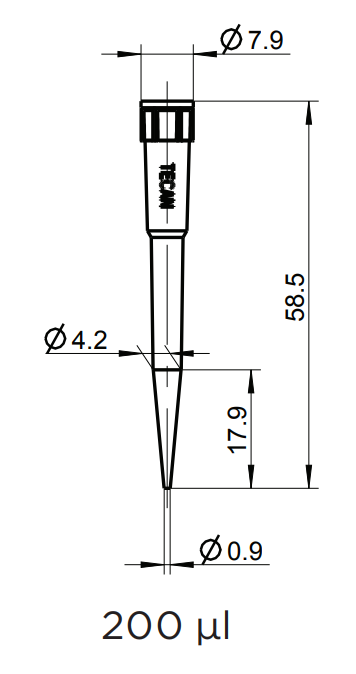
dt[3] = dttwo = tip_racks.DiTi_200ul_Filter_LiHa(name = "tip rack")
lh.deck.assign_child_resource(resource = dt, rails = 12)
plate = plate_carriers.MP_4Pos_flat(name = "plate carrier1")
plate[3] = plates.DeepWell_96_Well(name = "plate", with_lid= False)
plate[1] = plates.CaCo2_Plate_24_Well(name = "24 plate", with_lid = False)
plate[0] = plates.CaCo2_Plate_24_Well(name = "24 plate2", with_lid = False)
lh.deck.assign_child_resource(resource = plate, rails = 18)
station = wash.Wash_Station(name = "wash station")
lh.deck.assign_child_resource(resource = station, rails = 26)
dt2 = tip_carriers.DiTi_3Pos___Waste(name = "plate carrier2")
lh.deck.assign_child_resource(resource = dt2, rails = 27)
plate3 = plate_carriers.MP_3Pos_PCR(name = "plate carrier3")
plate3[0] = plates.DeepWell_96_Well(name = "well3", with_lid = False)
lh.deck.assign_child_resource(resource = plate3, rails = 33)
async def visualiser():
vis = Visualizer(resource=lh)
await vis.setup()
evo = EVO(diti_count= 8)
EVO.num_channels = 8
evo.liha = LiHa(backend = evo, module = EVO.LIHA)
op = Pickup(
resource= dttwo.get_items("A1:H1"),
offset= 0,
tip=["A1:H1"]
)
#await evo.liha.get_disposable_tip(tips= [op], z_start = 877.0, z_search = 5.0)
asyncio.run(visualiser())
and here’s the terminal:
PS C:\Users\Name\Downloads\plr test> & "C:/Program Files/Python311/python.exe" "c:/Users/Name/Downloads/plr test/visualisertest.py"
Resource wash_station was unassigned from the robot.
Resource testack was assigned to the robot.
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
WARNING: total_tip_length <= 0.
Please get in touch at https://forums.pylabrobot.org/c/pylabrobot/23
Resource tip rack carrier was assigned to the robot.
Resource plate carrier1 was assigned to the robot.
Resource wash station was assigned to the robot.
Resource plate carrier2 was assigned to the robot.
Resource plate carrier3 was assigned to the robot.
Websocket server started at http://127.0.0.1:2121
File server started at http://127.0.0.1:1337 . Open this URL in your browser.