I’d like to know more about robotic arms in general. Specifically:
-What’s the typical cost of entry for a solution that can, say, move 96 well plates less than 1 meter between a Hamilton and a plate reader?
-Do they generally require that you know a programming language?
-How do you pair a robotic arm to a Hamilton or Tecan? More specifically, do you send commands from VENUS? How do you manage the “handoff” (literally and figuratively!).
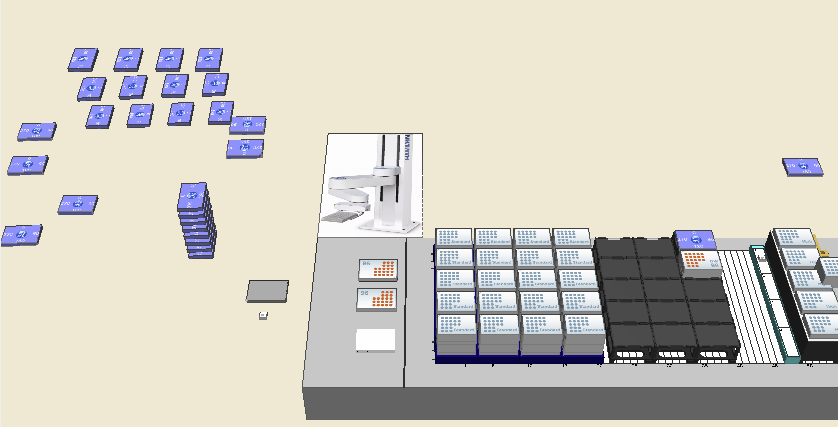
-What does your set up look like?
-Any brands you would recommend? UFactory for example was mentioned in another thread.
usually have to learn the vendor specific software to reach points
you can’t do it from VENUS. You need scheduling softwares like Overlord that orchestrate the liquid handler and robot arm. (You can however have a LYNX control a KX-2 arm which is a pretty neat full integration stack)
KX-2, uFactory are ‘modern’ arms. But it seems there is a boom in robot arm manufacturers entering biotech now. I’d just try to set up as many demos as you can. Companies wanna sell em to lab at the end of the day
In my experience Hamilton sells the third party devices in a solution at list price. In fact, sometimes the client buys the device directly (e.g., MSD Reader) and Hamilton builds the integration hardware for it and provides drivers.
Thanks everyone! @KyleCook_GeNovu , that is almost the exact type of set up I’d be interested in.
And thanks for the invite @smohler , and the details you shared. I had a feeling there may be some drivers directly in VENUS (or a script in VENUS could be run).
Would be interested to hear of other set ups as well.
Biosero Green Button Go software can control both the Hamilton and most commercially available arms. The PF400 and KX2 would be most common. Both can be put on rails. In Green Button Go we use a universal teach pendant that makes teach the arm and transports as easy as loading a teach plate and physically moving it between sites on your workcell. Its very easy to use.