Agreed, and let me provide some further detail:
Case 1
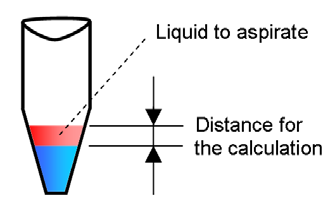
The liquid is only in the conical part (segment 2) of the tube. Only the geometry of segment two (the conical shape) will be taken into account for the calculation of the liquid following speed. The speed is calculated from the height of the amount of liquid that will be removed.
Case 2
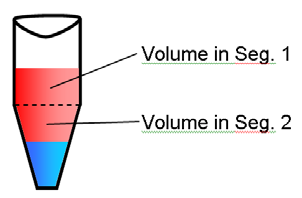
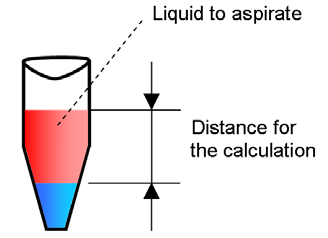
The liquid is in both segments of the tube. The calculation of the liquid following speed is a mixture of the amount of liquid in segment one and the amount of liquid in segment 2. An average speed is calculated that suits both segments. The result is a slightly deeper submerge depth in the cylindrical part.
Case 3
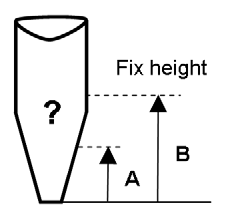
If Liquid Level Detection is not used, the liquid following speed will be calculated from the given fixed height above the well bottom where the aspiration should start with the known geometry of the tube. The system can calculate if this is a Case A or B: