We’re excited to announce something we’ve been working on for quite some time - Galago, a modern open-source lab automation software designed for real-world laboratory environments.
What Makes This Different
Unlike expensive commercial solutions that can cost hundreds of thousands (or more) and require lengthy integration cycles, Galago was built from the ground up to be:
Open source - Apache 2.0 license, no vendor lock-in
Beta-tested - Tested by several biotech companies outside of Science Corp.
Battle-tested - Over 5,000 successful automation runs in production
Minimal setup required - Get running quickly without complex configuration
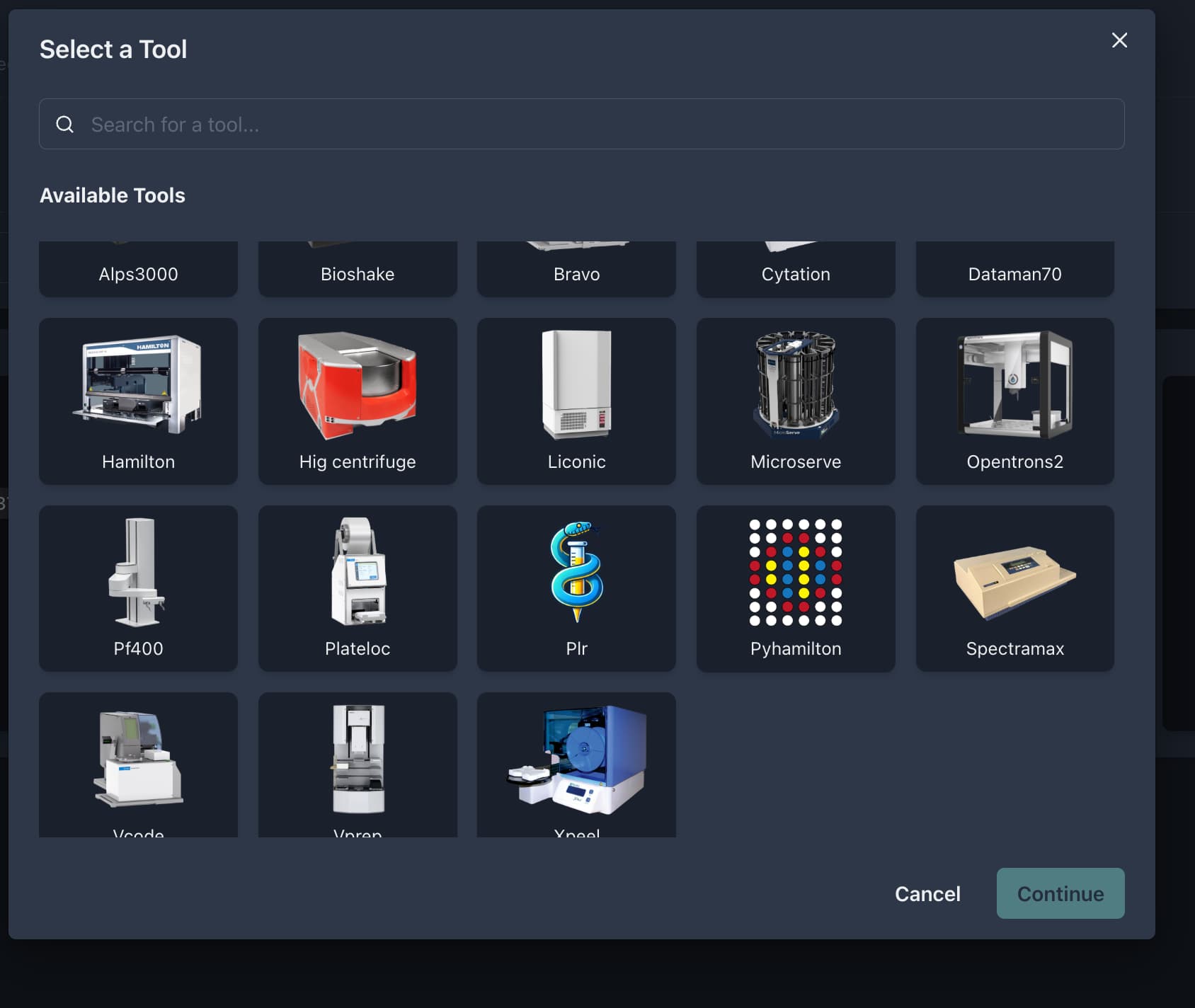
Multi-device integration - Unified interface for diverse lab equipment
Extensive driver collection - Over 20 instrument drivers.
Highlights:
Modern stack: Next.js, FastAPI, SQLAlchemy, and gRPC
No scripting required for basic workflows
Built-in code editor supporting Python, JavaScript, and C# with database access libraries
Drag-and-drop form builder for rapid UI creation
Real-time variables accessible in scripts and tool inputs for read/update operations
Full protocol logic: conditionals, loops, error handling, etc.
Why We’re Open Sourcing This
Frankly, we’re tired of seeing promising biotech companies (especially startups) held back by prohibitively expensive automation solutions. The current landscape often means:
Massive upfront costs that drain precious funding
Long integration timelines with third-party vendors who may not understand your specific needs
Inflexible systems that can’t adapt as your research evolves
Vendor lock-in that limits future options
What began as a solution for our own lab at Science Corporation is now ready to empower labs around the world. We believe powerful automation tools should be within reach for every lab, regardless of resources.
Multiple deployment options including Windows installer or just
pip install galago-tools
Web App: Complete interface with database, scheduler, and execution engine
Docker-based deployment for any OS
Ready to try it? Check out the documentation and installation guide at galago.bio. Pip installer and Docker images are public now - the repositories will be made public in a couple of weeks.
Questions or want to collaborate? Drop a comment below or reach out directly.
@evwolfson good luck! Let us know if you run into issues or if there are any specific drivers you need. We have several drivers in dev that we could prioritize based on need.
We’ve actually added both PLR and PyHamilton as tools available in Galago. Just updated the documentation with more info on each tool. Here’s a link to PLR and PyHamilton. Let us know what you think!
I had to specify the platform in the docker compose.yml to emulate in a AMD64 Docker container as I am on a Silicon Mac and got I some errors when composing out of the box, specifically: The requested image's platform (linux/amd64) does not match the detected host platform (linux/arm64/v8) and no specific platform was requested. No big deal, easy to emulate, more of a FYI here
Looks great. Looking forward to seeing the code when it is released.
I think something like this is very important for not only the reasons you mentioned but also for standardizing driver development to avoid wasted effort. Having a scheduler out there that has been tested in production and relased into the wild could be a game changer like e.g. blender.
The Galago repos are live! Galago Tools contains the tool drivers and Galago Core contains the front end. Please open Issues for bugs and feature requests, or post in Discussion for general questions.
@cwehrhan not yet. Would you like to help add this to the repo? We currently only support the PF400 when it comes to robot arms. What model arm do you have? You will have to reach out to thermo fisher and see if they are willing to share an SDK with you for their robot arm.