We have an opentron 2 with an attached P20 multi-channel GEN2. I was wondering if it is possible to script up a protocol that would allow me to pick up 8 tips and go to a source plate and aspirate variable volumes (say 10uL from back-most channel, 5uL from the middle channels, and 10uL from the front channel)?
I was wondering if there was a hardware limitation as some existing documentation says that the P20 GEN2 multichannel has a single motor that may not allow for this to happen?
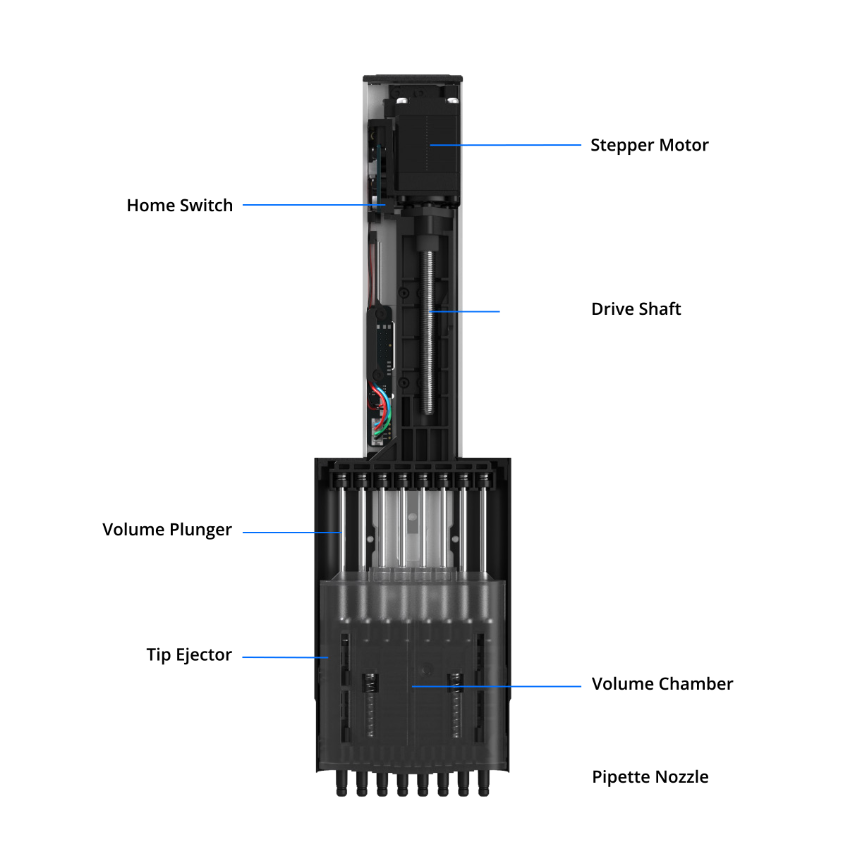
@positiveoption123 All of the channels on an 8-channel OT-2 pipette are controlled by one lead screw. If you look at the OT-2 pipette white paper, it has a diagram of an 8-channel pipette cut in half, which shows how the channels are all connected. So, there is a hardware limitation that would prevent you from aspirating/dispensing different volumes across channels.
Do you know if anyone has modified the OT-2 to allow for variable volumes? I’ve seen some crazy mods in the field so I wouldn’t be surprised if someone’s done it
I have never seen anyone do that type of modification. One of the system’s benefits is its ability to be modified, but I feel that for this type of implementation, you might as well build a new pipette from the ground up. I have seen people build various attachments for the gantry.
Unfortunately variable volume pipettes are generally way more expensive than opentrons pipettes are. An example would be the 96 variable volume channel on the lynx, or the flexible channel arm on the tecan fluent.
These are a totally different price point because you need an individual piston for each channel, and this creates much more complication. Essentially you’re using 8 (if it’s an 8 channel) different pipettes
I’ve gotten around this in various weird ways on an OT2, such as instructing users to load pipette boxes in specific orientations like moving the H row to another pipette box for example.
I’ve also used variable tip pickups (picking up 1-7 tips at a time from the tipbox (this is a far more code-intensive solution though and is a bit of a pain))
If you wanted some of my code for that I’d be happy to share it, but like I said, I’ve often found situations where variable volume channels are required because of a need for speed are better put on other more expensive robots if available.